A Dash of Maxwell’s
A Maxwell’s
Equations Primer
Chapter IV –
Equations Even a Computer Can Love
By Glen Dash, Ampyx LLC, GlenDash at alum.mit.edu
Copyright 2000, 2005 Ampyx LLC
In the preceding chapters we
have derived Maxwell’s Equations and expressed them in their “integral” and
“differential” form. In different ways,
both forms lend themselves to a certain intuitive understanding of the nature
of electromagnetic fields and waves. In
this installment, we will express Maxwell’s Equations in a their “computational
form,” a form that allows our computers to do the work. To give you an idea where we are going, here
are those equations:
Equation 1
Where:
E =
Electric field in V/m
B =
Magnetic flux density, B=mH
H = Magnetic field in Amps/m
V = Voltage
A =
The “vector potential” (which we will explain shortly)
rn = Charge
density in Coulombs/m3 of a particular charge element, n
rn
= Distance from a given charge or
current element, n, to the location of interest
vn = Volume
of a particular charge element, n
ln = Length of a particular current element, n
an = Area
of a particular current element, n
Jn
= Total current density (both
conductive and displacement) in amps/ m2 of a particular current
element, n
e, m = Permittivity and permeability respectively
We have added two elements we
have not seen before: the gradient
of the voltage (ÑV)and the “vector
potential” (A). We will explain
these terms in a moment, but for now note the following:
1. If we know the current
density (J) at every point within a volume of interest, we can calculate the
“vector potential” (A) by simple summation (Equation 1(d)). By taking the curl of the vector potential
(A), we can derive the magnetic flux density (B), and hence the magnetic field
(H) (Equation 1 (b)).
2. If we know
the charge density (r) at every point within a volume of
interest, we can calculate the voltage at every point (Equation 1(c)). We can
calculate the electric field (E) by taking the gradient of the voltage and
adding the time derivative of the vector potential (Equation 1(a)).
Obviously, to use these
equations we will need to understand what we mean by the “gradient of the
voltage” and the “vector potential” (A).
To do that, there is a bit of additional math to master.
In Chapter III, we introduced
two vector operations, the dot and cross product. The dot product of two vectors, R and S, computes the component
of Vector R which is aligned with Vector S.
The resultant is a scalar, not a vector. It is equal to:
By contrast, the cross
product of two vectors is a vector itself.
The cross product is equal to:

As indicated by the symbol ^, the direction of the cross product Vector T is
determined by the right hand rule. The
fingers of the right hand point from Vector R to Vector S, and the direction of
the cross product T is indicated by the thumb of the right hand.
To these two operations, we
now add a third, the gradient. As with
the common usage of the term, the gradient is a slope. A steep hill has a large gradient, a small
one a lesser gradient. The gradient of
a function is itself a vector, that is at any point in within an area of interest
it has both magnitude and direction.
Mathematically, the gradient is equal to:

Where:
f = A scalar function of x, y and z
i, j, k = Unit vectors in the x, y and z
directions respectively
Gradients are only applicable
to scalar functions. These are
functions which have a magnitude at every point within an area of interest, but
no direction. A mountain can be
described as a scalar function with the height at any point in within an area
of interest being expressed as:

Where Ht equals the height of
mountain in meters
If we want to know the slope
of the mountain, we can mathematically compute it by taking the gradient.
It is conventional to write
the gradient operation using the “del” operator. We introduced the del operator in our last installment. It is equal to:
We can multiply the del
operator by our scalar height function to derive its gradient:
Known what is meant by the
dot product, cross product, and gradient, we are now in a position to introduce
“vector identities.” Vector identities
are manipulations of the dot product, cross product, and gradient which can
greatly speed up our mathematical analysis.
For example, suppose we first take the cross product of two vectors R
and S and then take the dot product of the resultant and Vector R. Mathematically, this would be expressed as:

A moment’s reflection,
however, will reveal that the result of this operation is always equal to
zero. The cross product of vectors R
and S is a vector, T, whose direction is in a plane perpendicular to both R and
S. Therefore, the dot product of R with
T must equal zero. So we have the first
of our vector identities shown in Table 1.
For any two vectors R and S:

There are many more such
vector identities that we could derive and which we will find useful. For
example, both the dot product and the cross product are distributive. That is:
Further,
multiplying a cross product of two vectors, R and S by -1 produces the same
result as taking the cross product of R and -S:

Table 1 lists more vector
identities. For the proofs of these,
see Reference 1.
Table 1: Some Vector Identities.
As we described did in our
previous chapter, we can always substitute the del operator for one of the
vectors in our idenities. We will
substitute the del operator for Vector R in Table 1 to produce Table 2, to which
we will add a few more useful identities.
Once again, for derivations of see Reference 1.
Table 2: Some vector identities using the “del”
operator (Ñ)
are shown. S and T are vector functions
or fields, while f is a scalar function. Note that the gradient of a scalar is itself a vector function or
field, so Ñf can
be substituted for S or T in any of the above.
The first of the expressions
making up the “computational” form of Maxwell’s Equations, Equation 1(a), is
used to derive the electric field at any point within a volume of interest. The
electric field is a function of voltage.
Voltage is a scalar function, like the height of a mountain. At any point within a volume of interest it
has magnitude, but no direction. We can
take its gradient to produce vectors which give us the “slope” of the voltage.
If the vector potential A in Equation 1(a) is unchanging, then:

This simply means that the
electric field is equal to the gradient of the voltage when ¶A/¶t=0.
In one dimension:

Where:
DV = Voltage
between two points, V1 and V2
Dx = Distance in meters between points 1 and 2
Or, equivalently for small Dx:

More generally in three
dimensions:
What this says is that if we
know the voltage at every point within a volume of interest and if A is
unchanging, then we can derive the electric field.
To derive the voltage at any
point within a volume of interest, it turns out that we only need to know where
the electric charges are. This is
illustrated in Figure 1. A number of
charged spheres are shown suspended in space.
Other than for these charged spheres, the space is empty. We will
calculate the voltage at point P due to these charged spheres.
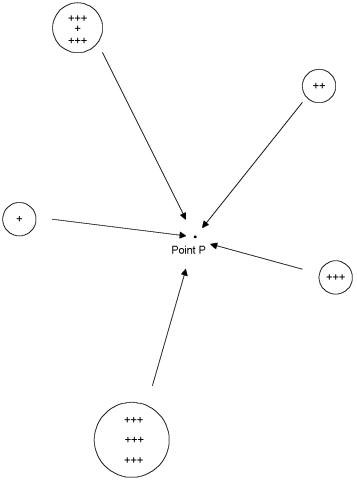
Figure 1: Where charges are static, the voltage at point
P can be computed by summing the contributions of surrounding charges.
In the first chapter in this
series, we calculated the work require to move a charge q from infinity to some
point, such as point P in Figure 1. The work required is:
Where:
W= Work in joules
q =
The charge being moved in Coulombs
Qn
= Charge on sphere n in Coulombs
rn
= Distance in meters from sphere n to point P in Figure 1
The work per unit charge
moved (W/q) is equal to the voltage V, and is in units of Joules per
Coulomb. The voltage at P is therefore:
We will find it convenient to re-express this equation in
terms of charge density r rather than the total charge on a given sphere, Qn. Charge density is simply the total charge on
each sphere divided by its volume, v.
So:
The vector potential A does
not have the kind of readily measureable substance that an electric or magnetic
field has. It is mostly just an
mathematical tool. Mathematicians have defined
the vector potential A as being a hypothetical field with the following
characteristics:

In words rather than symbols,
the curl of the vector potential is, by definition, equal to the magnetic flux
density, and the divergence of A is everywhere equal to zero.
Before we move on to explore
the usage of the vector potential, A, we will need to take yet another math
detour. We will use some of our vector
identities to manipulate Maxwell’s Equations.
We know that the differential form of the first of
Maxwell’s equations is:

Since D=eE and, from Equation 1(a) E=-ÑV-¶A/¶t:
The last line is known
as “Poisson’s Equation” and is usually
written as:

Where:
In a region where there is no
charge, r=0, so:

which is known as “Laplace’s Equation.” The operator Ñ2 is known as the “Laplacian.”
From Maxwell’s fourth
equation expressed in differential form, we can, with some difficulty, state
the vector potential in terms of currents using our vector identities.
This derivation in may seem
daunting, but we have see the form of the last line before. It is in the form of Poisson’s
Equation. Therefore, we know that the
solution is going to be – it is in the form of
the solution to Poisson’s Equation.
Poisson’s Equation states:

And we have already derived
this expression for V.
So we can simply substitute
the A for V and mJ for r/e and we have the solution
for the vector potential, A, in terms of the total current density, J:
Where vn = ln
an (volume equals length times area).
We can also break both the
vector potential A and the current density J into their Cartesian components:
This equation tells us that
the vector potential is aligned with the currents that produce it. If we sum
the currents flowing in the x direction as shown in the equation, we will be
able to calculate the vector potential in the x direction at any particular
point of interest. The same is true for the vector potential in the y and z
directions. That means that the vector
potential A, like the scalar potential V, can be derived by mere
addition, multiplication and division, things a computer does handily.
The last piece of the puzzle
requires relating the vector potential A to the electric field E. To do this we will use that time-honored
tradition in mathematics, propose a solution and plug it into our equations to
see if it works. The solution that we
will propose which relates A to E is:
We will test this solution by
plugging it into the third of Maxwell’s Equations:

Having verified the relationship between the vector
potential A and the electric field E, we can now state Maxwell’s Equations in
their computational form, which, of course is where we started:

Before moving on, we should
note one caveat. These equations assume
that the effects of changing charges and currents are felt throughout the
volume of interest instantaneously.
That is, of course, not true, the effects propagate outward at a finite
speed. In the next chapter we will
adapt these equations to deal with finite propagation speeds using the theory
of “retarded currents.” Then we will
act as the computer and calculate by hand the near and far field radiation from
a short length of wire. That short
length of wire will, in turn, become our building block for the powerful Method
of Moments which we will introduce in the chapters to come.
References
1. Spiegel, M., Vector Analysis and an Introduction to Tensor
Analysis, Schaum’s Outline Series, McGraw Hill, 1959.
2. Kraus, J., Electromagnetics, Fourth Edition, McGraw Hill,
1992.